
Stabilità
Quando un sistema è soggetto ad un segnale perturbatore, esso, può veder
evolvere il proprio assetto; se al cessare del segnale perturbatore il
sistema torna nelle sue condizioni inziali i sistema viene detto stabile.
Il sistema è' invece instabile quando si allontana definitivamente
dalle condizioni iniziali.
Un esempio di sistema stabile è dato da una pallina vincolata a muoversi
su una curva contenuta in un piano verticale con la concavità verso l'alto.
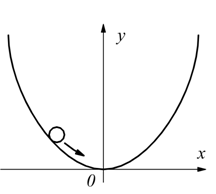
Supponendo che in condizioni di riposo la pallina si trovi nel punto 0,
se a questa viene applicata una forza impulsiva (spinta) in grado di spostarla
da tale posizione, al cessare della perturbazione la pallina, dopo un certo
numero di oscillazioni di ampiezza via via decrescente a causa dell'attrito,
ritornerà nella condizione iniziale.
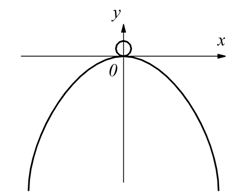
Se invece la pallina è vincolata a muoversi su una curva con la concavità
rivolta verso il basso, supponendo che la pallina sia in equilibrio inizialmente
nel punto 0, applicando una forza impulsiva tale da spostarla anche solo
leggermente, una volta lasciata la posizione iniziale, cade lungo la curva
a cui è vincolata, senza più ritornare nella posizione di partenza. Nel
primo caso il sistema è stabile,nel secondo è instabile.
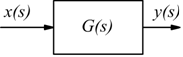
La stabilità di un sistema può essere studiata esaminando la funzione
di trasferimento complessiva del sistema G(s). Infatti si può pensare
di applicare al sistema un segnale perturbatore costituito da un impulso
unitario ed esaminare la sua risposta nel tempo.
Supponendo inizialmente il sistema in condizioni di riposo, con uscita nulla, se esso è stabile, la risposta all'impulso unitario (delta di Dirac) deve tendere a zero, mentre se è instabile diverge.
Nella pratica la risposta di un sistema instabile non assume mai valori infinitamente grandi, perché intervengono delle non linearità che delimitano l'ampiezza della risposta dell'uscita.
Siccome la trasformata di Laplace di un impulso unitario (impulso deltiforme di durata nulla ampiezza indefinita e area unitaria) vale 1, la risposta del sistema a tale perturbazione si ottiene eseguendo l'antitrasformata della funzione di trasferimento G(s).
Si dispone la funzione di trasferimento del sistema nella sua prima forma canonica

poi, la si decompone in frazioni parziali tramite lo sviluppo di Heaviside
dove i poli p1,p2..pn possono essere
reali o complessi coniugati.
Nel caso di poli reali, si ha dalla tabella delle antitrasformate che
il per il generico termine
questo termine tende a zero per t → ∞
solo se p è negativo mentre se p > 0 tale termine tende ad ∞.
Nel caso si trovino dei poli complessi coniugati del tipo
![]()
Nella scomposizione in frazioni parziali della G(s) si trovano termini del tipo
che poi possono essere riuniti in un unico termine
che antitrasformata risulta essere
![]()
Se la parte reale k è negativa l'espressione precedente è rappresentata da sinusoidi smorzate che per t → ∞ tendono a zero; se k è positiva queste sinusoidi sono di ampiezza crescente e tendono ad una ampiezza infinita per t → ∞
Da quanto visto: è condizione necessaria e sufficiente per la stabilità di un sistema lineare è che tutti i poli della funzione di trasferimento G(s) del sistema siano negativi se reali o che abbiano parte reale negativa se complessi coniugati. .
In pratica si rappresentano i poli del sistema sul piano complesso ; perché il sistema sia stabile, occorre che tutti i poli si trovino nel semipiano sinistro (parte reale negativa) . Basta che ci sia un solo polo nel semipiano destro (parte reale positiva) perché il sistema sia instabile.
Quindi per valutare la stabilità, non è necessario antitrasformare la funzione di trasferimento del sistema G(s) ma solo esaminare la posizione dei poli sul piano complesso.
Criterio Routh
Il criterio di Routh è un metodo matematico per stabilire se un polinomio di grado n ammette radici a parte reale positiva, senza risolvere l'equazione che si ottiene uguagliando a zero il polinomio, ma solo dall'esame dei suoi coefficienti. Va applicato al denominatore D(s) della funzione di trasferimento del sistema ( funzione di trasferimento ad anello chiuso ):
Consideriamo il polinomio di grado n
![]()
Dai teoremi dell'algebra si può dimostrare che, perché il polinomio abbia radici tutte negative, è necessario ma non sufficiente, che i coefficienti ao a1 a2..an abbiano tutti lo stesso segno e che nessuno di essi sia nullo. Accertata tale condizione, si può calcolare la tabella di Routh disponendo i coefficienti su due righe prendendoli in ordine alterno.
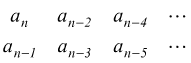
La terza riga viene formata con i termini delle prime due righe prendendoli in ordine alterno: secondo la regola:
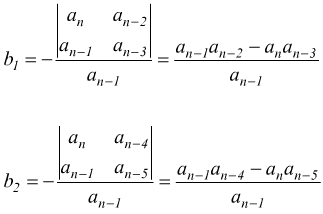 etc..
etc..
si continua così finchè non si ottiene un termine xi=0 compilando la tabella secondo l'orditura:
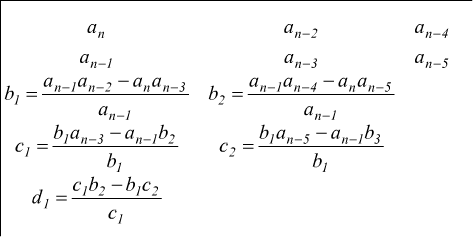
nel caso particolare di polinomi di grado 3 e 4

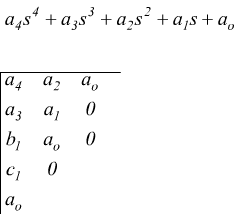
Il criterio di Routh afferma che un sistema è stabile se nella tabella non vi sono cambiamenti di segno nei numeri della prima colonna.
Architettura di sistemi
Supponendo di voler riempire un serbatoio di acqua fino ad un livello prefissato; oltre al serbatoio ci occorrerà una conduttura e una valvola (ON/OFF) attivabile tramite un comando (pulsante o manopola).
Il processo eseguito, consiste nel trasferimento della massa di liquido che riempie il serbatoio facendolo passare da un livello di partenza fino al livello desiderato. Un sistema di questo tipo, denominato a catena aperta richiede la presenza di un operatore che svolga una funzione di controllo e di regolazione . Ovviamente, come si è visto nel caso dei sistemi idraulici, ci sarà una funzione di trasferimento G(s) che descriverà il comportamento fisico del sistema che metterà in relazione una variabile di ingresso x (ad es. lo stato del comando) e una variabile di uscita y (ad esempio il livello del liquido nel serbatoio).
Un modo per migliorare l'efficacia del controllo e ridurre l'effetto di eventuali disturbi sul sistema è quello di utilizzare sistemi a catena chiusa,
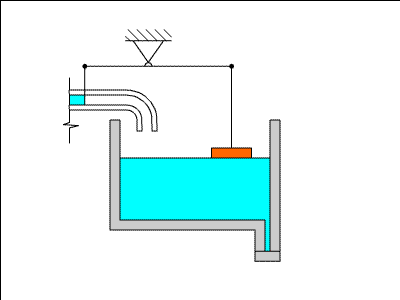
dove ad esempio si misura il livello del liquido nel serbatoio e si attiva un'azione correttrice nel caso in cui il livello sia diverso dal valore desiderato.
L'anello di reazione disegnato in figura svolge questa funzione e consente
la regolazione automatica del livello del serbatoio.
L'azione correttrice dipende dalla differenza tra il valore misurato
e il valore atteso del livello del liquido.
Ai fini del controllo della grandezza di uscita si utilizza la retroazione
negativa, perché questo tipo di reazione è meno sensibile alle variazioni
parametriche, ha una maggiore immunità ai disturbi e permette di ottenere
il valore atteso della grandezza controllata con un errore prefissato.
Vi sono anche degli svantaggi: il sistema è più complesso e sono necessari
più componenti, si ha una diminuzione del guadagno rispetto alla condizione
di anello aperto, possono instaurarsi condizioni
di instabilità.
La retroazione positiva, implica invece che il segnale di reazione si
sommi al segnale di ingresso introducendo una deriva
che porta l'uscita verso una saturazione, perdendo
di fatto il controllo del sistema.
Questa condizione di funzionamento è inaccettabile e il progettista
deve accertarsi che non si verifichi mai.
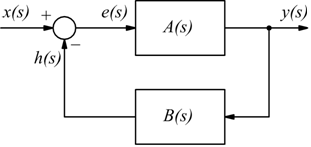
Sistemi reazionati
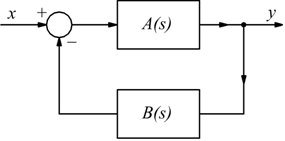
Un generico sistema di controllo retroazionato è normalmente costituito da elementi di per sé stabili collegati fra loro in vari modi riducibili alla forma rappresentata nel disegno, con un blocco di andata A(s) è un blocco di reazione che ha funzione di trasferimento B(s).
Per poter esaminare la stabilità dell'intero sistema occorre calcolare la funzione di trasferimento complessiva E calcolarne i poli, oppure applicare il criterio di Routh. Nel primo caso si va incontro a calcoli laboriosi, mentre nel secondo caso non si hanno indicazioni sufficienti sul grado di stabilità del sistema.
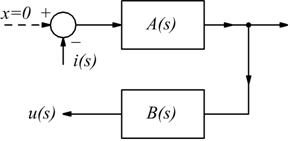
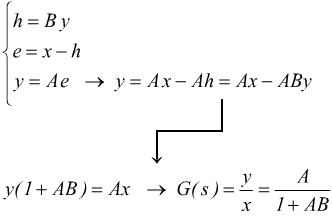
I due metodi seguenti tendono ad evitare calcoli complessi determinando la stabilità del sistema partendo dall'esame della funzione di trasferimento ad anello aperto:
![]()
che si ottiene azzerando l'ingresso e tagliando in un punto qualsiasi l'anello di reazione. ad es. se si apre l'anello come indicato in figura e si immette con segnale di riferimento x nullo un segnale i(s) dall'altra parte del taglio si ottiene un segnale di uscita u(s) .
![]() da
cui si ottiene
da
cui si ottiene
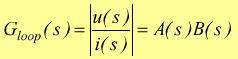 funzione
di trasferimento ad anello aperto
funzione
di trasferimento ad anello aperto
Il vantaggio di prendere in considerazione la funzione di trasferimento
ad anello aperto è che per questa è relativamente facile calcolare poli
e zeri in quanto derivante dalla riduzione di blocchi in cascata.
Metodi di analisi comunemente usati che usano la funzione di trasferimento
ad anello aperto sono quelli di Nyquist e di Bode.
Criterio di Nyquist
E' un criterio di stabilità per sistemi reazionati e prende in considerazione il diagramma polare della funzione di trasferimento ad anello aperto A(jω)B(jω) con un segnale di ingresso di tipo sinusoidale. Esso si basa sul teorema di Cauchy sulle funzioni analitiche.
Se p è numero dei poli del guadagno dell'anello GLoop
a parte reale positiva, il sistema ad anello chiuso G(s) risulta
stabile, se il diagramma di Nyquist della GLoop=A(s)B(s)
completo della sua parte speculare
( immagine della funzione per -∞ < ω < +∞
) compie in senso orario un numero di giri n attorno al punto di coordinate
(-1;0) pari al numero di poli p con parte reale positiva; cioè se n=p
il sistema è stabile.
Spesso la Gloop=A(s)B(s) nel senso che non contiene poli a parte reale positiva, per cui p=0 e il criterio può essere enunciato attraverso la sua forma ridotta.
Se il sistema retroazionato è stabile ad anello aperto ( p=0 ) allora esso è tale anche ad anello chiuso se n=0; cioè il diagramma di Nyquist della GLoop non deve contenere al suo interno il punto di coordinate ( -1;0 ).
Criterio di Bode
Il criterio di Bode non è altro che il criterio di Nyquist trasferito sui diagrammi cartesiani invece che su quelli polari. Si considera la funzione di trasferimento del sistema a catena aperta ( Gloop ).
Se abbiamo i diagrammi cartesiani occorrerebbe trovare sul diagramma
della fase la pulsazione ω° a cui corrisponde uno sfasamento di
180° e in corrispondenza di ω° sul diagramma del modulo esaminare
se la corrispondente attenuazione è maggiore o minore di 1 ovvero maggiore
o minore di 0 dB.
Il più delle volte si dispone solo del diagramma del modulo e non è agevole
determinare ω° allora si può osservare il diagramma polare.
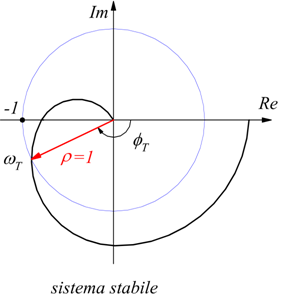
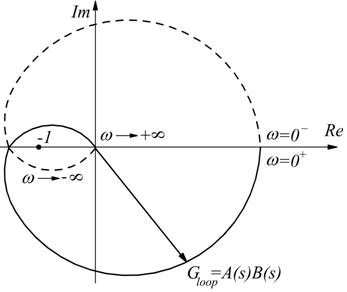
Un sistema stabile non abbraccia il punto di coordinate ( -1, j0 ) del
diagramma polare e appare normalmente come rappresentato in figura.
In tal caso un cerchio di raggio unitario con centro nell'origine taglia
il diagramma nel punto T cui corrisponde una ωT
detta pulsazione di taglio; il vettore corrispondente ha modulo unitario
e argomento φT minore di 180°.
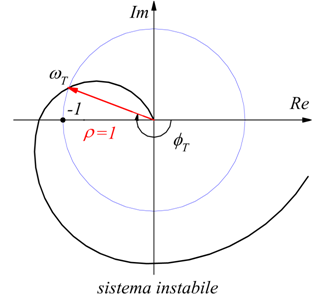
Nel caso di un sistema instabile il sistema si presenta ,invece, come
rappresentato nel secondo grafico.
Il diagramma abbraccia il punto di coordinate ( -1, j0 ) e il cerchio
di raggio unitario taglia questa volta il diagramma polare in un punto
T, in cui il vettore ρ presenta un argomento φT>180°.
Sul diagramma cartesiano il valore T corrispondente all'attenuazione
1 ( 0 dB ) è quello in cui il diagramma cartesiano taglia l'asse 0 dB.
Basta allora calcolare lo sfasamento in corrispondenza del valore trovato.
Il criterio di Bode afferma che il sistema è stabile se lo sfasamento calcolato in corrispondenza della pulsazione di taglio è inferiore a 180°; è instabile se superiore a 180°.
Un'altra regola, più generale ( e grossolana ) consiste nell'osservare
il diagramma del modulo della Gloop: se l'attraversamento
dell'asse a 0 dB avviene con una pendenza di 20 dB/dec il sistema è stabile;
se la pendenza è maggiore o uguale a 40 dB/dec il sistema è instabile.
Margine di fase
Questo parametro fornisce una misura quantitativa del grado di stabilità di un sistema
![]()
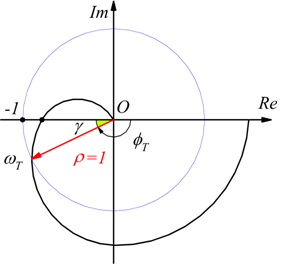
tanto più piccolo è γ tanto più il sistema si avvicina al limite si stabilità; se γ diventa negativo il sistema è instabile.
Nella pratica per avere un buon grado di stabilità il sistema deve presentare margine di fase non inferiore a 40°÷50° .