
Reti correttrici
Si sono visti in precedenza alcuni criteri, tramite i quali si può valutare la stabilità di un sistema a spira chiusa; qui in particolare ci riferiamo al criterio di Bode che considera la funzione di trasferimento ad anello aperto .
![]()
Si studia il diagramma del modulo di questa funzione e si cerca di
individuare la pulsazione di taglio
( pulsazione di attraversamento dell'asse a 0dB ).
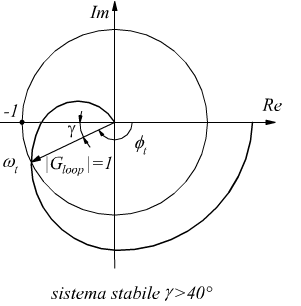
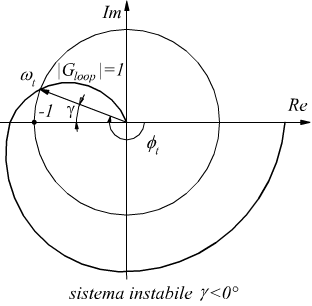
Questo metodo, afferma che il sistema è stabile se la fase della funzione
Gloop calcolato in corrispondenza della pulsazione
di taglio è inferiore a 180°; è instabile se superiore a 180°.
Si è inoltre fatto notare, che se l'attraversamento avviene con una
pendenza maggiore ai 20dB/dec il sistema è fortemente indiziato di instabilità.
E' stato, inoltre introdotto un parametro: il margine di fase
![]()
nel quale appare φt=fase della Gloop
alla pulsasione di taglio.
Per avere un buon grado di stabilità, il sistema deve presentare margine
di fase positivo non inferiore a 40°, quindi γ≥40°.
Con questi pochi elementi da ricordare, cerchiamo di considerare alcuni
sistemi instabili per vedere se c'è un modo di ripristinarne la stabilità.
Tecniche di stabilizzazione
Il modo più semplice e immediato di rendere stabile un sistema è quello
di ridurre opportunamente il guadagno statico di anello.
L'effetto che in tal modo si ottiene risulta immediato se si osserva
il diagramma polare del sistema in esame.
Infatti se si ha ad esempio un sistema la cui funzione di trasferimento
ad anello aperto vale:

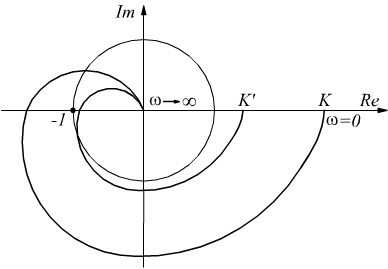
dove le tre costanti di tempo T1, T2 e
T3 sono positive; ipotizzando di far variare il guadagno
statico ( il guadagno in continua ) da K a K',
il diagramma polare subirà la modificazione illustrata a fianco.
Si nota che per K il sistema appare instabile, in quanto il diagramma
abbraccia il punto -1+j0.
Se però riduce il guadagno statico K al valore di K' il diagramma polare si rimpicciolisce e può risultare come quello disegnato, in cui il punto -1+j0 si trova all'esterno del diagramma polare (sistema formalmente stabile).
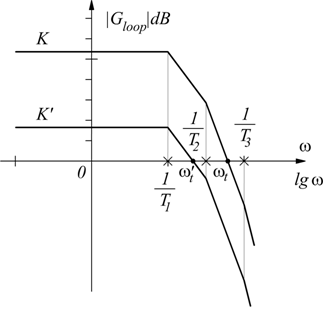
La stessa variazione rappresentata sul piano cartesiano viene
qui illustrata.
si ottiene un diagramma simile al precedente ma traslato verso
il basso Il nuovo diagramma risulta aver un valore minore ω't<ωt
della pulsazione di taglio e quindi anche del corrispondente sfasamento
φt.
Questa opzione è poco consigliabile, perchè si peggiorano le caratteristiche
statiche del sistema e si riduce anche la rapidità di risposta;si
ottiene cioè un sistema più lento e meno preciso.
Si preferisce seguire altre strade, che consistono nell'alterare la
configurazione poli-zeri del sistema.
Sul diagramma di Bode, si effettua lo spostamento delle costanti di
tempo T al denominatore della funzione di trasferimento del sistema.
Considerando la funzione di prima:
L'alterazione avviene introducendo nella funzione di trasferimento una coppia polo-zero,cioè inserendo in cascata sulla linea di andata un elemento che abbia funzione di trasferimento:
 ottenendo
una funzione corretta
ottenendo
una funzione corretta

di fatto, si ha lo spostamento della costante di tempo T1.
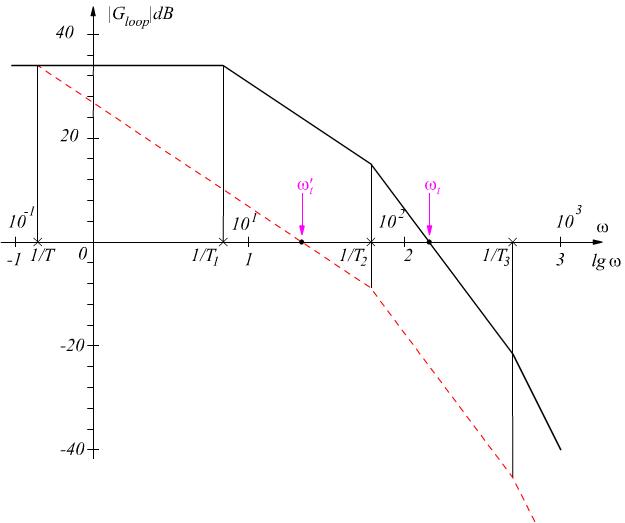
Si ha un diagramma delle attenuazioni che ha ancora, una pulsazione di taglio ω't e uno sfasamento φ't poco maggiore del precedente ,con un guadagno statico del sistema ancora pari a K.
Cioè la stabilizzazione avviene solo a spese delle prestazioni dinamiche del sistema,senza alterare quelle statiche. Si è cioè ottenuto, una funzione di trasferimento del tutto simile alla precedente,ma con costante di tempo T al posto di T1.
Un altro modo per migliorare la stabilità del sistema è quello di spostare una o più delle costanti di tempo minori, ( pulsazioni angolari più elevate e distanti dall'origine ) in modo da renderle più piccole riducendo così il loro contributo allo sfasamento in corrispondenza di ωt .
Questa operazione può essere eseguita ponendo ancora in cascata sulla linea di andata un elemento con funzione di trasferimento del tipo visto con T < T3 .

Si ottiene un sistema del tutto simile al precedente,ma con la costante di tempo più piccola diminuita ( e costante d'angolo corrispondente aumentata). Si può naturalmente ottenere sia l'aumento della costante di tempo maggiore,sia la diminuzione delle costanti di tempo più piccole.
Se queste ultime sono ridotte in modo tale che le corrispondenti pulsazioni d'angolo siano almeno 3÷4 volte maggiori della pulsazione di taglio ωt si ottiene un diagramma di Bode che scende con una pendenza di -20dB/decade fino a valori di ω molto maggiori di ωt e il sistema risulta sicuramente stabile con un conveniente grado di stabilità (margine di fase di 50° 60°).
Per ottenere questo risultato in un sistema a reazione, bisogna inserire nella linea di andata e più precisamente fra i vari stadi amplificatori del segnale differenza,delle reti elettriche che abbiano funzione di trasferimento con le caratteristiche indicate .
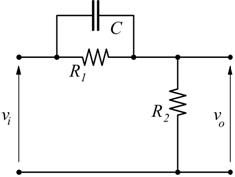
Rete ritardatrice
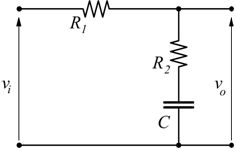
Una rete ritardatrice è un circuito RC secondo lo schema riportato qui a fianco.
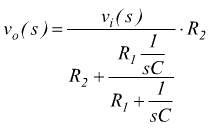
La sua funzione di trasferimento si può ottenere con la regola del partitore
 in
pratica
in
pratica
 risulta
risulta
![]()
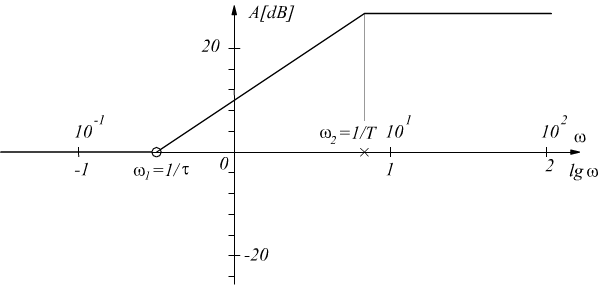
e il diagramma di Bode delle attenuazioni appare come in figura seguente (ad es.)
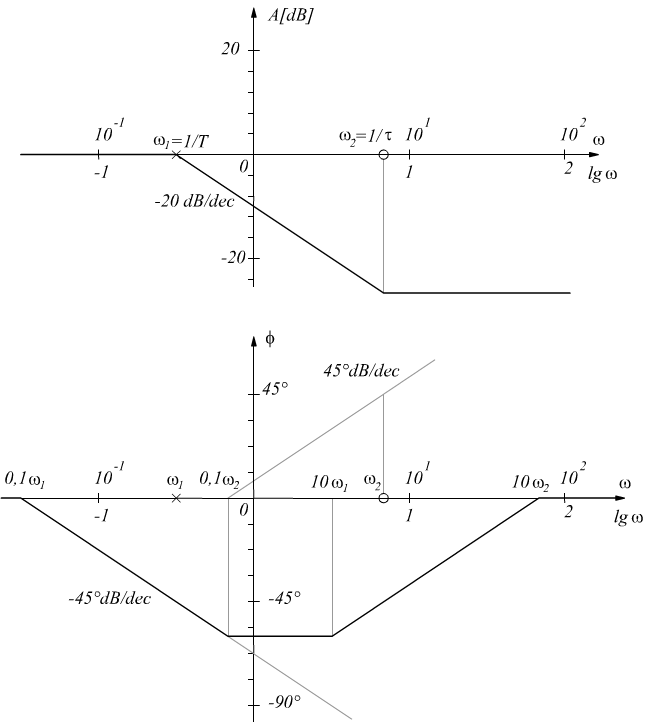
Come si può notare il diagramma coincide con l'asse a zero dB per ω<ωt= 1/T, essendo la costante numerica K=1, poi scende con pendenza -20dB/dec fino a valori di ω=ω2=1/τ oltre il quale diventa una retta parallela all'asse delle ascisse.
Lo sfasamento φ risulta negativo entro un certo intervallo di frequenza al di fuori del quale è nullo,da cui il nome rete ritardatrice o lag in quanto dà luogo a uno sfasamento sempre in ritardo.
Per quanto detto basta far coincidere la costante τ con una costante di tempo del sistema,per provocare una compensazione polo-zero descritta in precedenza.
Rete anticipatrice
Una rete anticipatrice è un circuito RC secondo lo schema riportato qui a fianco.
Anche la sua funzione di trasferimento si può ottenere con la regola del partitore
con una funzione di trasferimento:

con  risulta
risulta
![]()
il diagramma di Bode delle attenuazioni e degli sfasamenti sono (ad es.):
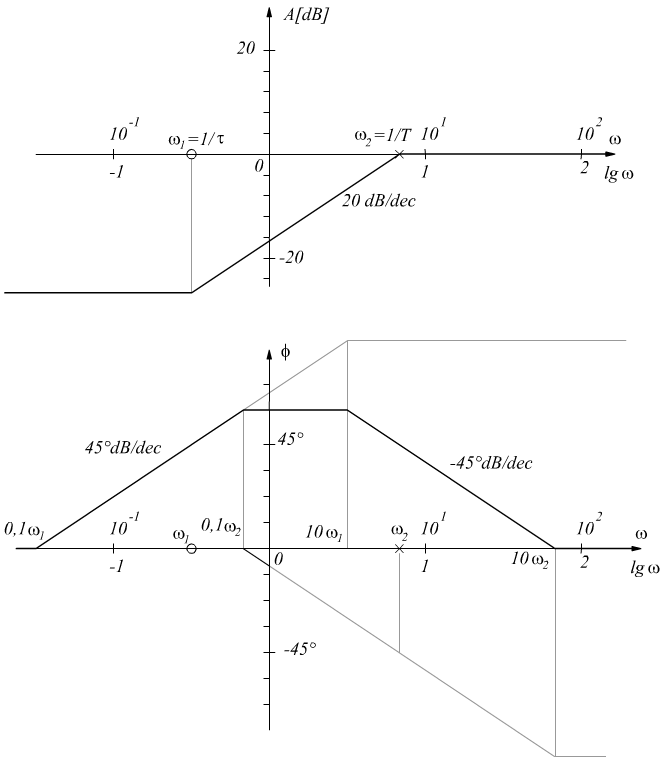
Come si può notare il diagramma delle attenuazioni coincide con l'asse
zero dB per ω>ω2 mentre per ω<ω1
il diagramma è una retta parallela all'asse delle ascisse di ordinata
a < 1 perciò la rete anticipatrice determina una riduzione
del guadagno statico del sistema.
Per ovviare all'inconveniente si può porre in cascata alla rete suddetta un amplificatore di guadagno:
 ottenendo
un diagramma del modulo così modificato
ottenendo
un diagramma del modulo così modificato
In tal caso il complesso amplificatore-rete anticipatrice risulta avere funzione di trasferimento:
Lo sfasamento introdotto dalla rete,come si può notare dai diagrammi
è sempre in anticipo da cui il nome
rete anticipatrice o lead.
Facendo coincidere la costante τ con una delle costanti di tempo minori del sistema si ottiene la riduzione di questa costante di tempo che verrà sostituita da T < τ.
Rete a sella
Spesso accade che per rendere sufficientemente stabile un sistema occorre eseguire ambedue le operazioni precedentemente descritte,cioè aumento della costante di tempo maggiore della funzione di trasferimento A(s)B(s) del sistema e diminuzione di una delle costanti di tempo minori. In tal caso è opportuno disporre in cascata ad un amplificatore della linea di andata una rete a sella avente funzione di trasferimento:
 con:
con: ![]() e
e 
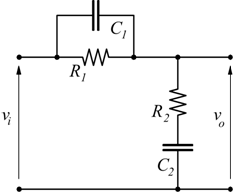
Una rete che realizza questo tipo di funzione di trasferimento è quella disegnata qui a fianco.
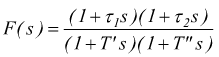
E' una combinazione della rete ritardatrice con quella anticipatrice. La sua funzione di trasferimento vale:

da cui risulta: ![]()
e se è ![]()
è anche: ![]()
Il diagramma di Bode relativo alla funzione di trasferimento della rete a sella è il seguente:
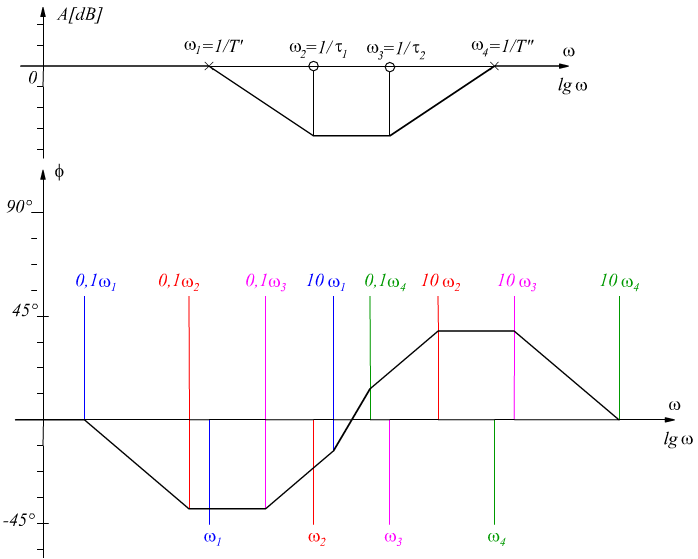
Se ora si fa coincidere τ1 con la costante di tempo di A(s)B(s) che si vuole aumentare τ2 con quella che si vuole ridurre,la funzione di trasferimento complessiva presenterà al posto delle due costanti di tempo in questione la T' e la T'' rispettivamente. Così si avrà una funzione di trasferimento corretta:

se si pone: ![]()
si ha: 
Occorre considerare che:
1.Nella determinazione delle reti stabilizzatrici i rapporti fra le
costanti di tempo T' τ1 τ2 e T" in tutti
i tipi di reti viste, non devono essere scelti di valore molto elevato
per questioni di pratica realizzabilità.
E' difficile realizzare reti stabilizzatrici con circuiti RC in cui
i rapporti suddetti superino il valore di 10÷15. Nel caso che
fossero richiesti per una buona stabilizzazione rapporti maggiori è
consigliabile usare due reti in cascata separate da una amplificatore
disaccoppiando i circuiti RC.
2. E' in pratica impossibile che ci possa essere una compensazione
perfetta fra le costanti di tempo numeratore della rete stabilizzatrice
e quella a denominatore della funzione di trasferimento del sistema
dato,che si intende aumentare o ridurre.
In pratica risulterà sempre una differenza fra esse e questo fatto darà
luogo ad un diagramma di Bode leggermente deformato.
3. Le reti in cascata possono essere inserite solo a monte di amplificatori ad elevate impedenza d'ingresso,perchè non venga alterata la loro funzione di trasferimento.