
Motore in corrente continua
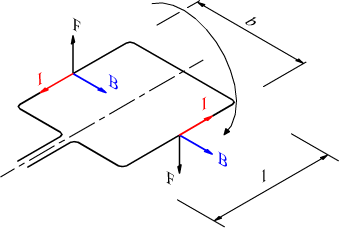
Dalle regole della fisica è noto che un conduttore di lunghezza l, percorso
da una corrente I e collocato in un campo magnetico con vettore induzione
B, è soggetto ad una forza F che ha direzione perpendicolare al piano formato
da B ed I.
Questo fenomeno è descritto analiticamente dalla formula
![]()
dove L è un vettore che ha la lunghezza del filo rettilineo e il verso coincidente con quello della corrente i.
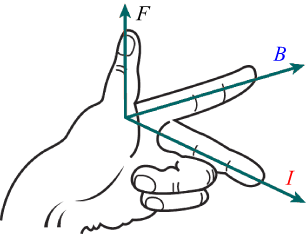
ed è associato alla regola della mano sinistra, dove il dito pollice, l'indice e il medio sono ricondotti all'orientamento ai tre vettori F, B, I.
Se α è l'angolo fra i vettori I e B,
si ha F=B·I·l·sinα.
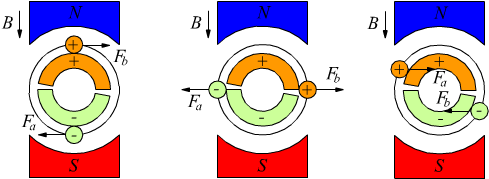
Dalla figura si nota che nella spira B e I sono ortogonali fra loro, per
cui sin(90°)=1 si ha, dunque F=BlI: la spira è dunque soggetta ad una coppia
motrice Cm:
![]()
Si ha il moto fino a quando i due vettori F diventano collineari (quando
la spira è in posizione verticale) poi bisogna trovare la maniera per farlo
proseguire.
Come si nota, lo stesso lato della spira, ruota per quasi mezzo
giro a contatto col polo positivo della spazzola, poi (superando
la posizione verticale) lo stesso lato della spira commuta il suo
contatto col polo negativo della spazzola, il senso della corrente
si inverte, pertanto, nella spira stessa.
un modello tridimensionale di questo apparato si trova in questa
pagina.
Questo implica, anche, una inversione delle due forze meccaniche, una volta raggiunta la posizione verticale. La commutazione della corrente nella spira, è dunque, una azione indispensabile a mantenere costante la coppia di forze che alimenta il moto rotatorio.
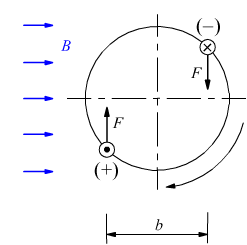
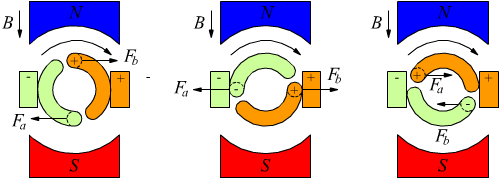
Se volessimo considerare solo le due estremità della spira rotanti (e a contatto) sulla superficie delle lamelle del collettore, che in questo caso ipotizziamo fisse con lo statore, il contesto potrebbe essere come quello indicato in figura:
Dove con (+) si intende la corrente uscente dal piano verso l'osservatore
e con (-) la corrente entrante nel piano verso il basso.
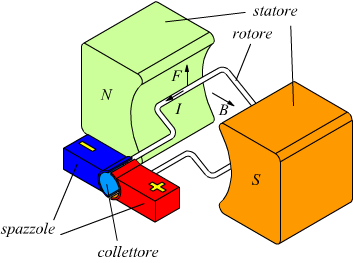
Nella realtà le due lamelle del collettore sono congiunte e solidali ai
due estremi della spira rotante e sono a contatto con le spazzole che forniscono
l'alimentazione elettrica:
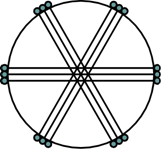
Poi ci sono degli accorgimenti tecnologici che consentono di aumentare l'intensità della forza, sostituendo alla spira uno o più avvolgimenti anch'essi collegati alle spazzole. Questo insieme di avvolgimenti viene montato su un tamburo di materiale ferromagnetico che aumenta l'accoppiamento magnetico fra la parte mobile (rotore) e la parte fissa (statore) viene denominato armatura.
Le funzioni del rotore e dello statore, possono essere invertite, mettendo
i magneti sul rotore e l'armatura sullo statore, come avviene nel caso
del motore brushless. Il dispositivo appena descritto, viene chiamato,
motore ad eccitazione indipendente, in esso il campo magnetico B viene
generato non da un magnete permanente (calamita) ma da un elettromagnete
.
L'intero sistema può essere schematizzato come:
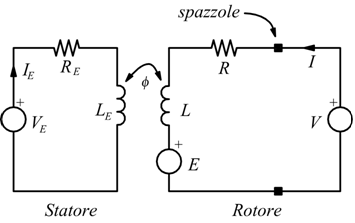
VE= tensione di campo (di eccitazione)
IE=corrente di campo
LE= bobina (elettromagnete) di campo
I= corrente di armatura
R=resistenza di armatura
L=induttanza di armatura
V=tensione di alimentazione di armatura
E=forza controelettromotrice d'armatura
ϕ=flusso di campo
La f.c.e.m. E viene prodotta dall'induzione elettromagnetica, quando in motore ruota. Sull'armatura, trascurando L che a regime (in continua) è un corto, si ha:
![]()
La forza controelettromotrice di armatura è ricondotta alla velocità angolare del rotore dalla:
![]()
![]()
La costante elettrica KE dipende dal flusso magnetico e dal numero di spire dell'avvolgimento. E' un parametro fondamentale della macchina a corrente continua e si misura in V s/rad; in esso sono dunque raggruppate tutte le costanti costruttive della macchina.Posto che C sia la coppia motrice:
![]()
si ha KT=KE le due costanti hanno una denominazione diversa solo per il fatto che che si misurano in unità diverse:KE in (V s/rad) mentre KT in (N m/A) KT viene detta costante meccanica.
Dalle equazioni precedenti si ha:
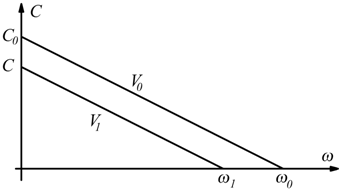
La rappresentazione grafica che lega la coppia motrice alla velocità angolare per un dato valore della tensione di armatura è qui riportato:
Funzionamento a vuoto
Allo spunto (all'avvio): la macchina è ferma ( ω=0)→E=0
nel circuito circola la corrente $$I_S=V/R$$
detta anche corrente di spunto.
Ovviamente si avrà anche una coppia
allo spunto: $$C_S=K_TI_S=K_TV/R$$
A causa di questa coppia, il motore accelera e ruota sempre più velocemente, viene, dunque generata la forza controelettromotrice $E=K_Eω$ con corrente circolante:
alla fine il motore raggiungerà la velocità di regime che in assenza di carico è:
 velocità
a vuoto
velocità
a vuoto
Funzionamento sotto carico
Durante il funzionamento a vuoto la macchina ruota con corrente e coppia
nulle, non c'è scambio di potenza fra la macchina e l'esterno.
Applicando una coppia resistente CL il rotore rallenta con
E e circola una corrente:
che produce una coppia motrice C=CL.
Il motore si stabilizza a quella velocità che gli permette di generare una coppia motrice esattamente uguale ed opposta a CL. A regime dunque è C=CL.
 ma
ma  per
cui:
per
cui:
 ponendo
ponendo  si
ha
si
ha
![]()
H è denominata costante
motore.
Potenza
![]()

PA=Potenza assorbita
PU=Potenza utile
Pm=Perdite meccaniche
Pe=Perdite elettriche (RI2)
Le perdite elettriche in particolare, sono costituite dalle perdite per effetto joule sul rotore e dalla potenza di eccitazione del circuito magnetico:
![]()
Talvolta non vengono assegnati i dati per il calcolo della potenza di eccitazione, così possiamo trascurare il suo contributo.